
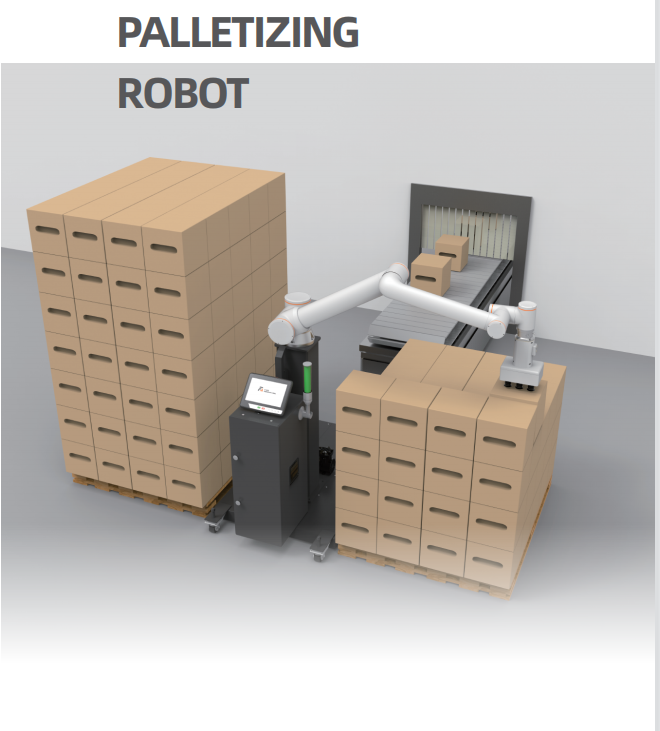
หุ่นยนต์จัดเรียงพาเลทอัตโนมัติเต็มรูปแบบ


- backpack
- ประเทศจีน กวางตุ้ง ฝอซาน
- 2024
- 1,000
✓ ง่าย ถึง ดำเนินงาน และ เรียบง่าย ถึง โปรแกรม
สามารถ เป็น ใช้แล้ว กับ a พาเลท แจ็ค หรือ รถยก
จบ การดำเนินการ เครื่องมือ การกำหนดค่า:
✓ มาตรฐาน เครื่องดูดฝุ่น ที่ยึด
✓ ทั่วไป มาตรฐาน จบ ผู้ถือ
หุ่นยนต์จัดเรียงพาเลทอัตโนมัติเต็มรูปแบบ
✓ ไม่ต้องเพิ่มเซ็นเซอร์
✓ ใช้งานง่ายและตั้งโปรแกรมได้ง่าย
สามารถใช้กับรถลากพาเลทหรือรถยกได้
สิ้นสุดการกำหนดค่าเครื่องมือดำเนินการ:
✓ ที่วางสุญญากาศมาตรฐาน
✓ ด้ามจับมาตรฐานทั่วไป
✓ เครื่องมือจับยึดปลายแบบกำหนดเอง (รายการพิเศษ)



ข้อมูลจำเพาะของผลิตภัณฑ์:
| แหล่งก๊าซ | 0.5-0.8Mpa (เครื่องกำเนิดสุญญากาศ) |
| ปริมาณการใช้อากาศ | 350-450nl/นาที |
| แหล่งจ่ายไฟ | 220VAC 50เฮิร์ต ±10% |
| การใช้พลังงานสูงสุด | 5KW |
| น้ำหนักอุปกรณ์ทั้งหมด | 350กก |
| ปรับให้เข้ากับขนาดกล่อง | สามารถขึ้นอยู่กับความต้องการของผู้ใช้ |
| วิธีการซ้อน | สามารถขึ้นอยู่กับความต้องการของผู้ใช้ |
| ความสูงปึกสูงสุด* | ความสูงซ้อนสูงสุดที่สามารถยกได้ และลดลงเป็น 2100 มม. (รวมพาเลท) โดยทั่วไปสูงถึง 1600 มม. (รวมพาเลท) |
| ขนาดพาเลทสูงสุด* | 1200มม.×1200มม |
| ขนาดกล่องวางซ้อนกันได้* | ยาว (260-500) มม.*กว้าง (200-450) |
| โหลดสูงสุดที่อนุญาต | 20กก |
| ความเร็วสแต็กที่เร็วที่สุด | ซ้อนได้สูงสุด 8 กล่องต่อนาที |
| รัศมีการทำงาน | รัศมีการทำงานสูงสุด 1600 มม |
| ฟังก์ชั่นความปลอดภัย | ทางเลือก: ตะแกรงนิรภัย, รั้วนิรภัย, พรมนิรภัย |
| ระดับ ไอพี | แขนหุ่นยนต์มีระดับ IP54 มือจับและอุปกรณ์เสริมอื่นๆ เป็นไปตามมาตรฐาน IP32 |
| อินเตอร์เฟซ | รองรับอินพุตและเอาต์พุตด้านความปลอดภัยหลายรายการ รวมถึงการหยุดฉุกเฉิน การป้องกันความปลอดภัย โหมดผู้ดูแลระบบ และโหมดการตั้งค่าจากโรงงาน |
| ฟังก์ชั่นความปลอดภัย | ฟังก์ชั่นหยุดฉุกเฉิน อินเทอร์เฟซความปลอดภัยภายนอกที่สงวนไว้ (สามารถควบคุมผ่านอินเทอร์เฟซ I/O) |
| สถานะตัวบ่งชี้ | เมื่อเปิดเครื่องตามปกติ ไฟแสดงสถานะจะเป็นสีเขียวเสมอ เมื่อปิดเครื่อง ไฟแสดงสถานะจะดับลง |
ซอฟต์แวร์จัดวางบนพาเลทอย่างง่าย
ซอฟต์แวร์ ง่าย การจัดวางบนพาเลท ขจัดความจำเป็นในการเขียนโปรแกรมหุ่นยนต์ขั้นสูง ผู้ใช้จะต้องป้อนข้อมูลสำคัญเพียง 3 ชุดเท่านั้น:
ขนาดกล่องกระดาษ (กว้าง x ยาว x สูง) ขนาดพาเลท: ความกว้างของพาเลท ความยาวพาเลท ความสูงของพาเลท ความสูงของกล่องซ้อน ขนาดสายพานลำเลียง:
ความสูงของสายพานลำเลียง, ตัวบ่งชี้ตำแหน่งสายพานลำเลียง (เซ็นเซอร์บนเครื่องจัดเรียงพาเลทเพื่อตรวจสอบว่าสายพานลำเลียงอยู่ในตำแหน่งแล้ว, หน้าจอ
แสดงไฟแสดงสถานะสีแดงหรือเขียว) ด้วยข้อมูลนี้ ระบบจะคำนวณและกำหนดทิศทางการเคลื่อนไหวของหุ่นยนต์โดยอัตโนมัติ
ช่วงขนาดของวัตถุที่วางบนพาเลท

ความยาว 1200
กว้าง 1200
ส่วนสูง 2550

หุ่นยนต์จัดเรียงสินค้าบนพาเลทเป็นอุปกรณ์อัตโนมัติที่ใช้ในการจัดเรียงผลิตภัณฑ์เข้าด้วยกันตามลำดับและลักษณะเฉพาะ โดยทั่วไปจะใช้ในด้านลอจิสติกส์ คลังสินค้า และบรรจุภัณฑ์ของการผลิตภาคอุตสาหกรรม ต่อไปนี้เป็นวิธีการใช้หุ่นยนต์จัดวางบนพาเลท:
1. การเตรียมวัสดุ: ก่อนที่จะใช้หุ่นยนต์จัดวางบนพาเลท จำเป็นต้องเตรียมวัสดุก่อน ซึ่งรวมถึงการตรวจสอบว่าเครื่องหมายและข้อมูลจำเพาะของกล่องตรงตามข้อกำหนดหรือไม่ การตรวจสอบว่าวัสดุมีอายุการเก็บรักษาหรือไม่ และจัดเก็บไว้ในสภาพแวดล้อมที่แห้ง ปราศจากน้ำมัน และปราศจากฝุ่นหรือไม่
2. การตรวจสอบก่อนการปฏิบัติงาน: ก่อนที่จะเริ่มใช้งานหุ่นยนต์จัดเรียงพาเลท จำเป็นต้องตรวจสอบว่ารากฐานของพาเลทหลักมั่นคงหรือไม่ และพาเลทสะอาด ปราศจากคราบน้ำมัน และไม่มีการสึกหรอหรือไม่
3. เปิดหุ่นยนต์: ปฏิบัติตามคู่มือการใช้งานที่ผู้ผลิตให้มาเพื่อเปิดหุ่นยนต์จัดเรียงพาเลท ตรวจสอบให้แน่ใจว่าเชื่อมต่อสายเคเบิลและสายไฟทั้งหมดแล้ว
4. ตั้งค่าโปรแกรม: ตั้งค่าโปรแกรมของหุ่นยนต์จัดเรียงพาเลทตามขนาดของผลิตภัณฑ์และพาเลทที่ต้องการซ้อน ซึ่งมักจะเกี่ยวข้องกับการตั้งค่าพารามิเตอร์ เช่น ความสูง ความกว้าง และความลึกของผลิตภัณฑ์ที่หุ่นยนต์จะหยิบจับ
5. เริ่มการทำงาน: วางผลิตภัณฑ์ในพื้นที่การทำงานของหุ่นยนต์จัดเรียงพาเลท จากนั้นกดปุ่มเริ่มต้น หุ่นยนต์จัดเรียงสินค้าบนพาเลทจะหยิบและซ้อนผลิตภัณฑ์บนพาเลทโดยอัตโนมัติ
6. การตรวจสอบการดำเนินงาน: ในระหว่างการทำงานของหุ่นยนต์จัดวางบนพาเลท ผู้ปฏิบัติงานจำเป็นต้องตรวจสอบการทำงานของอุปกรณ์อย่างใกล้ชิด หากพบความผิดปกติให้กดปุ่มหยุดฉุกเฉินทันทีและแจ้งให้เจ้าหน้าที่ซ่อมบำรุงตรวจสอบและซ่อมแซม
7. ดำเนินการให้เสร็จสิ้น: เมื่อหุ่นยนต์จัดเรียงพาเลทเสร็จสิ้นการดำเนินการ ผู้ปฏิบัติงานจะต้องนำพาเลทออกจากพื้นที่ทำงาน และวางพาเลทใหม่ลงในพื้นที่ทำงานเพื่อเตรียมพร้อมสำหรับการดำเนินการครั้งต่อไป
8. ปิดหุ่นยนต์: หลังจากเสร็จสิ้นการดำเนินการทั้งหมดแล้ว ให้ปิดหุ่นยนต์จัดเรียงพาเลทตามคำแนะนำในคู่มือการใช้งาน และตรวจสอบให้แน่ใจว่าได้ถอดแหล่งจ่ายไฟและสายเชื่อมต่อทั้งหมดออกแล้ว






